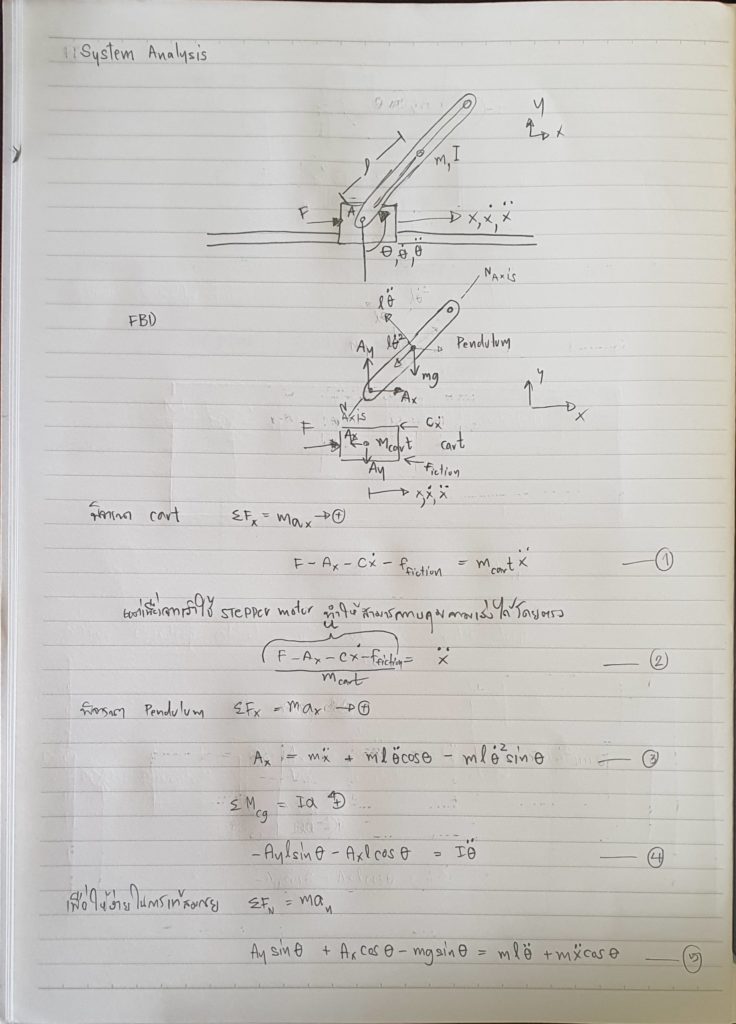
…มาถึงตอนที่จะเริ่มต้นออกแบบ Controller สำหรับ Inverted Pendulum กันแล้ววว… แต่ก่อนที่เราจะเริ่มออกกแบบ เราจะต้องทำการวิเคราะห์ระบบก่อน(System Analysis) เพื่อให้เราเข้าใจ Dynamic และ Stability ของระบบ แล้วเราถึงจะสามารถออกแบบตัวควบคุมได้อย่างถูกต้อง…
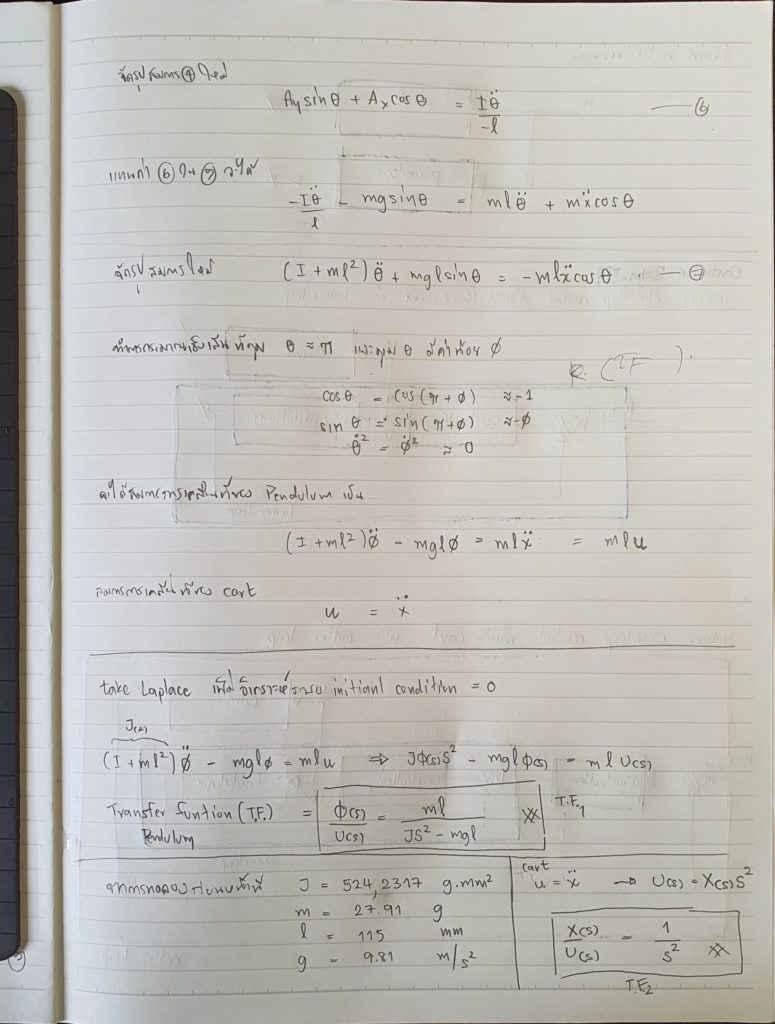
โดยการวิเคราะห์ระบบ สำหรับออกแบบตัวควบคุบแบบ PID เราจะเข้าไปวิเคราะห์ ใน s-domain ผ่าน Laplace Transform.. วิเคราะห์ Stability ผ่านตำแหน่ง pole และทดสอบด้วยการดู Impulse response
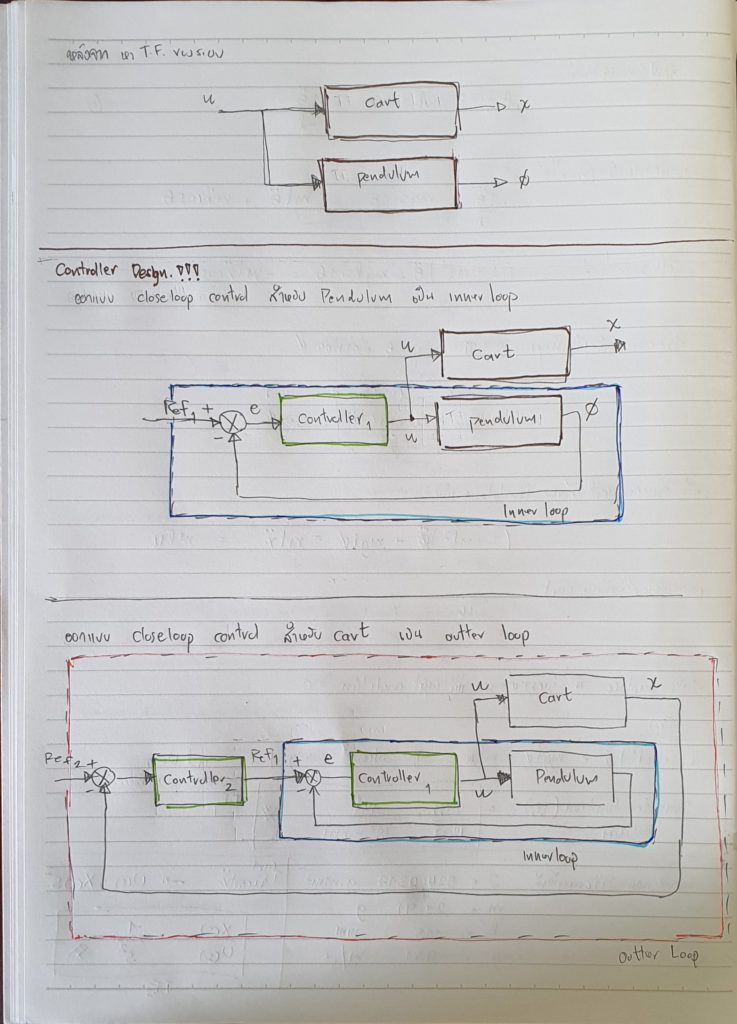
Block diagram ของระบบ Inverted Pendulum และ Inner-loop controller, Outter-loop controller
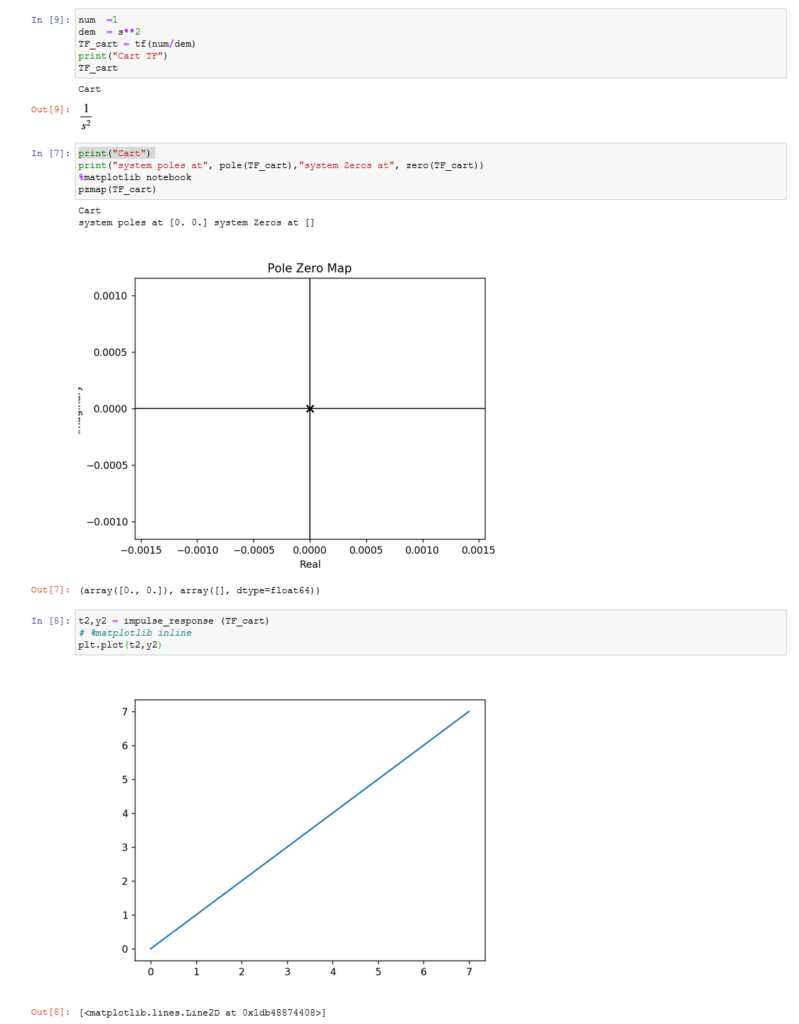
ตรวจสอบตำแหน่ง Pole , Zero และ Stability ของระบบ
ref:
Understanding Poles and Zeros
// ใครสนใจชุดคิดชุดนี้นะสามารถเข้าไปดูรายละเอียดได้ที่ https://www.aiiotshop.com/p/62