มาถึง EP.7 สำหรับชุดคิท Inverted Pendulum 😀😀สำหรับฝึกออกแบบระบบควบคุม(Control Theory)
ตอนนี้เราก็จะออกแบบ Controller ตัวสุดท้ายแล้ว🤩 ที่ใช้ในการควบคุมตำแหน่งของตัวรถ(Cart) ไม่ให้เคลื่อนที่ไปชน Limit switch 😲
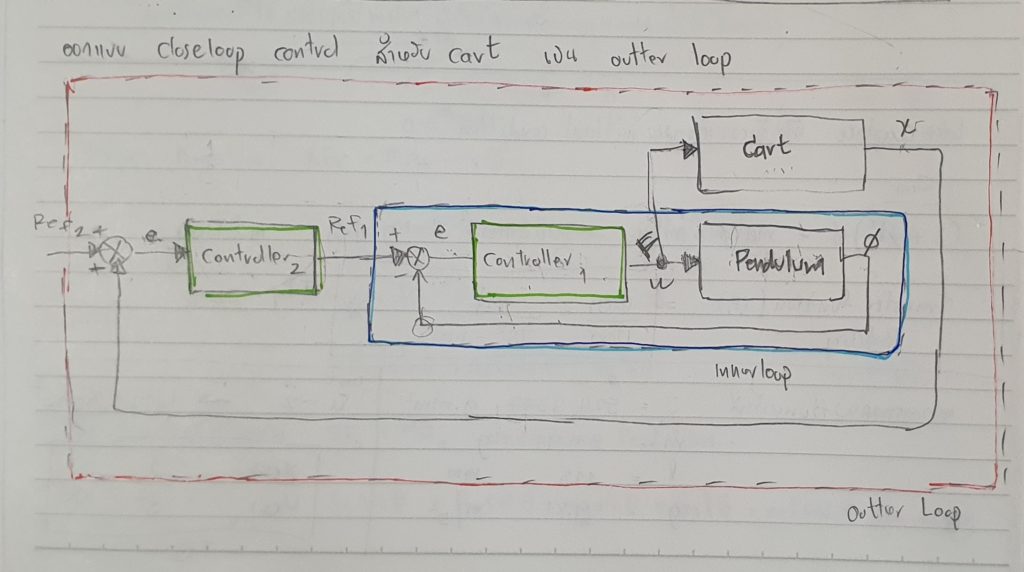
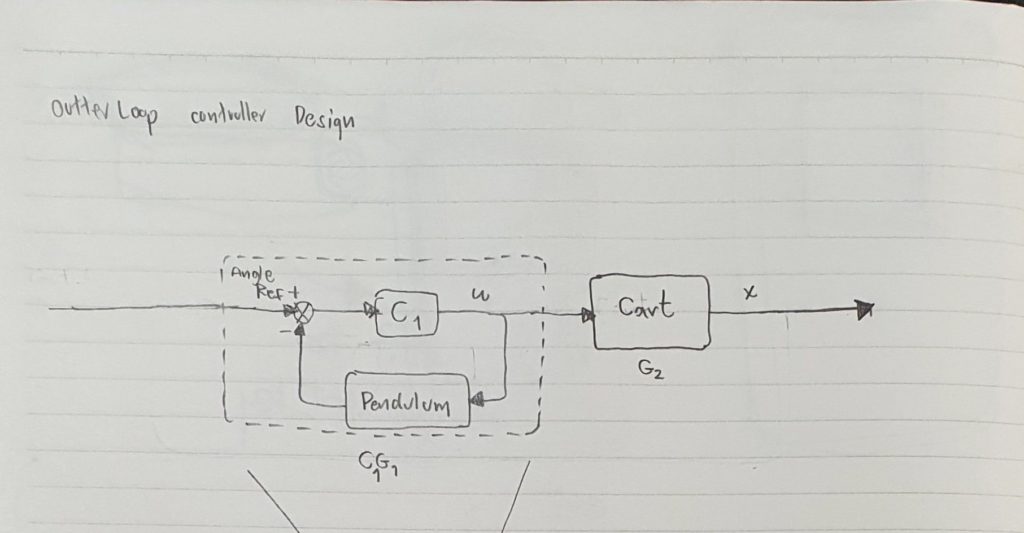
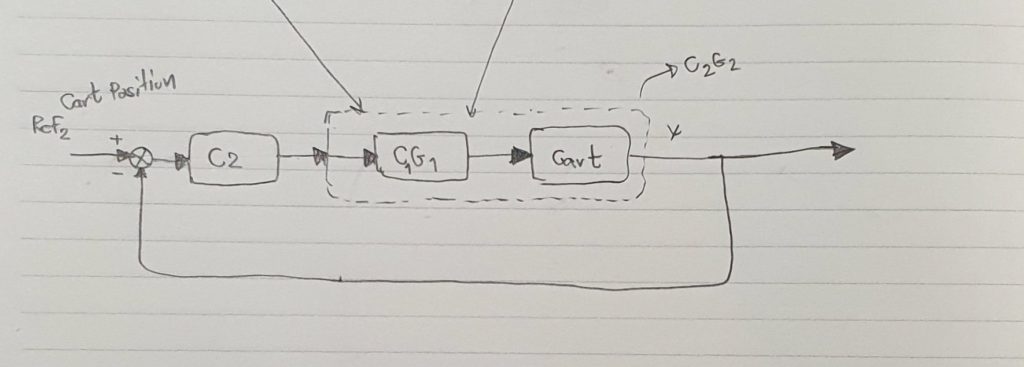
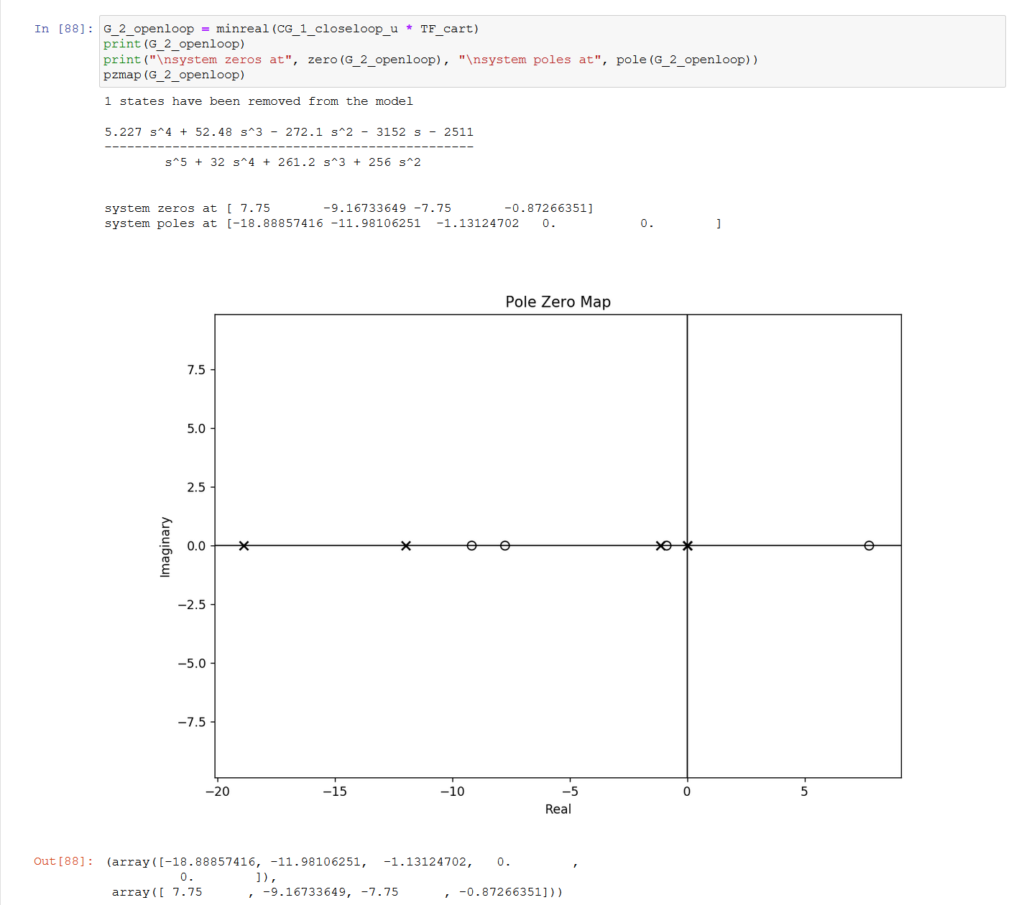
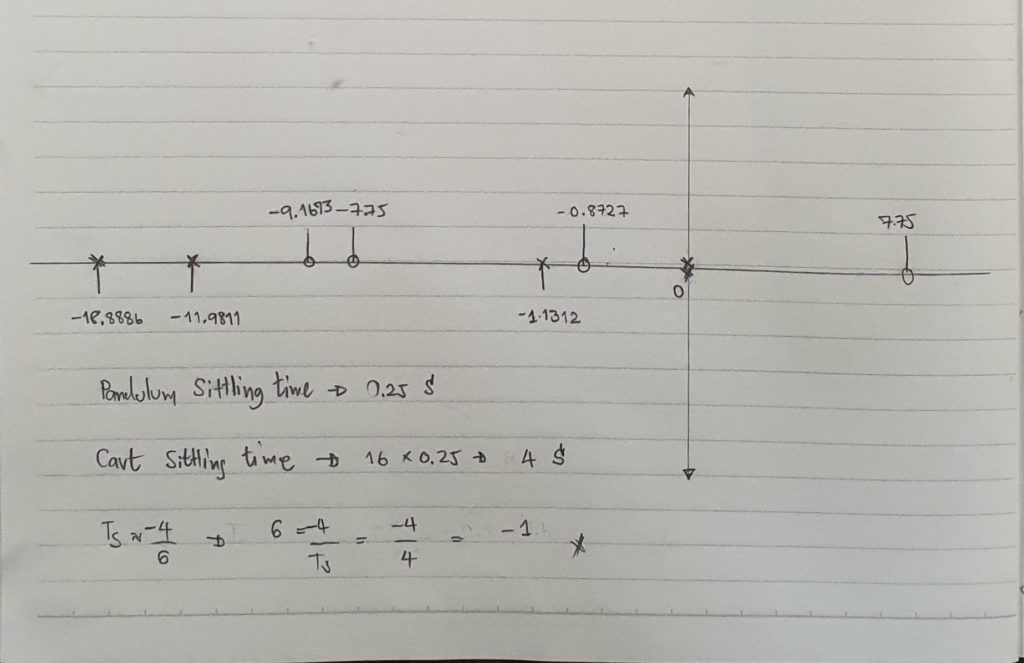
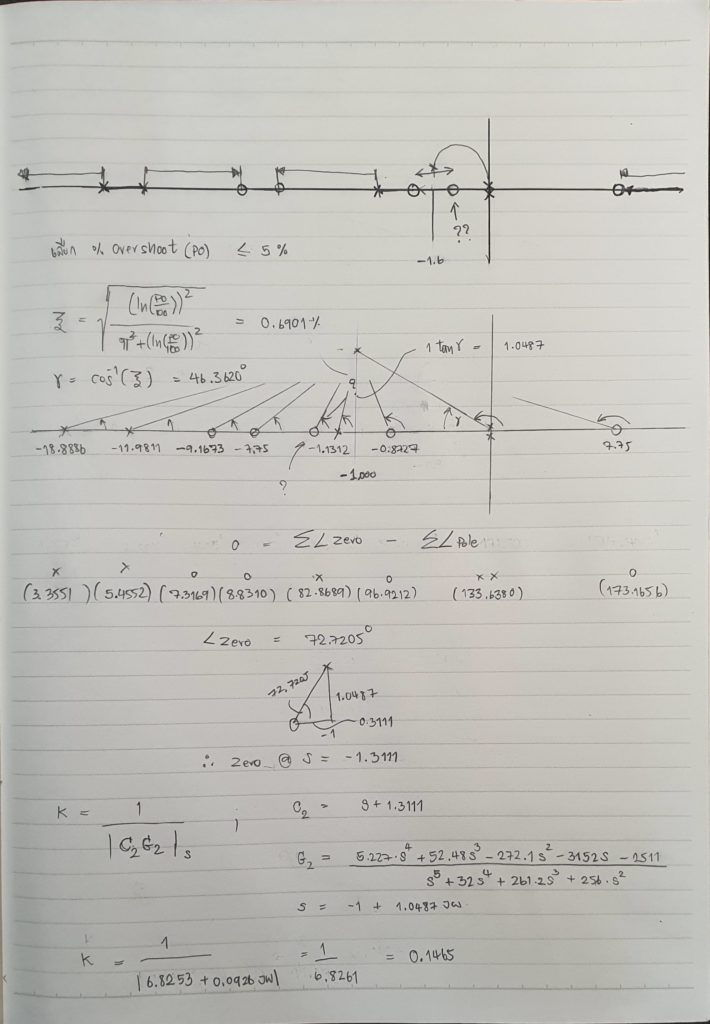
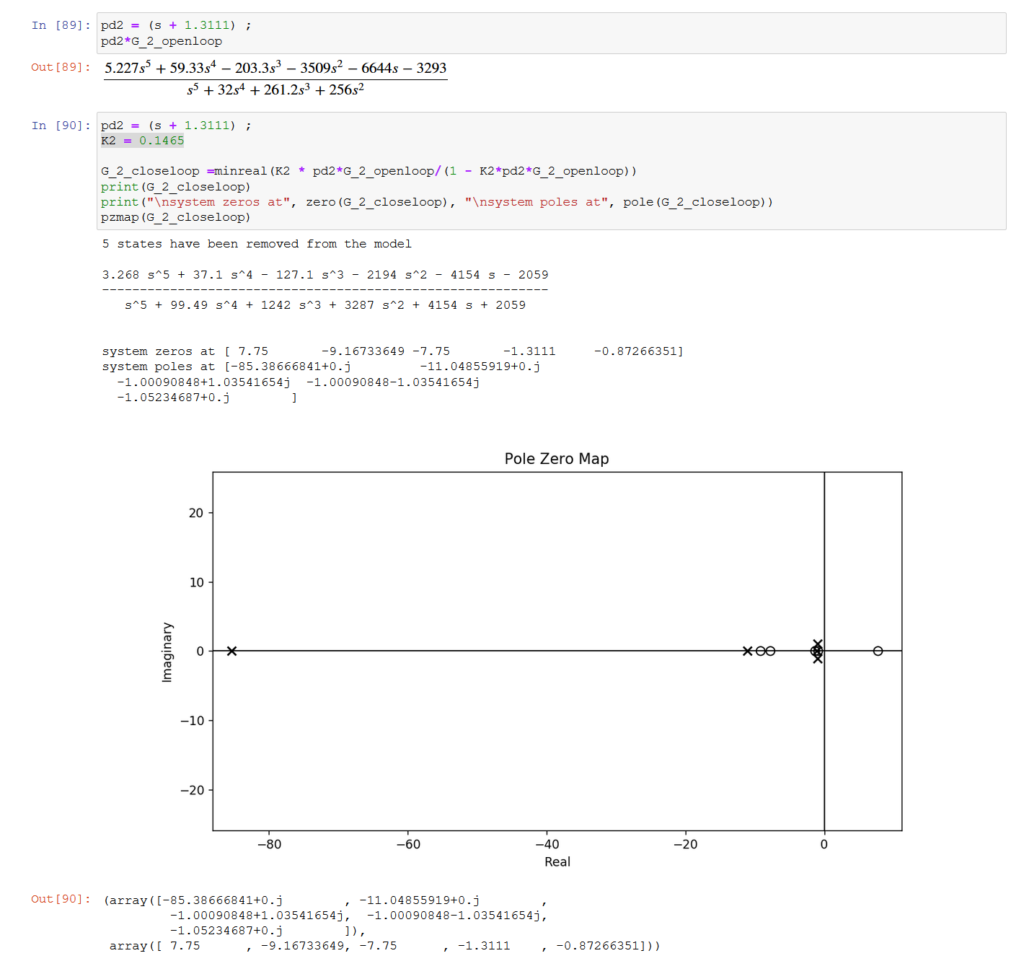
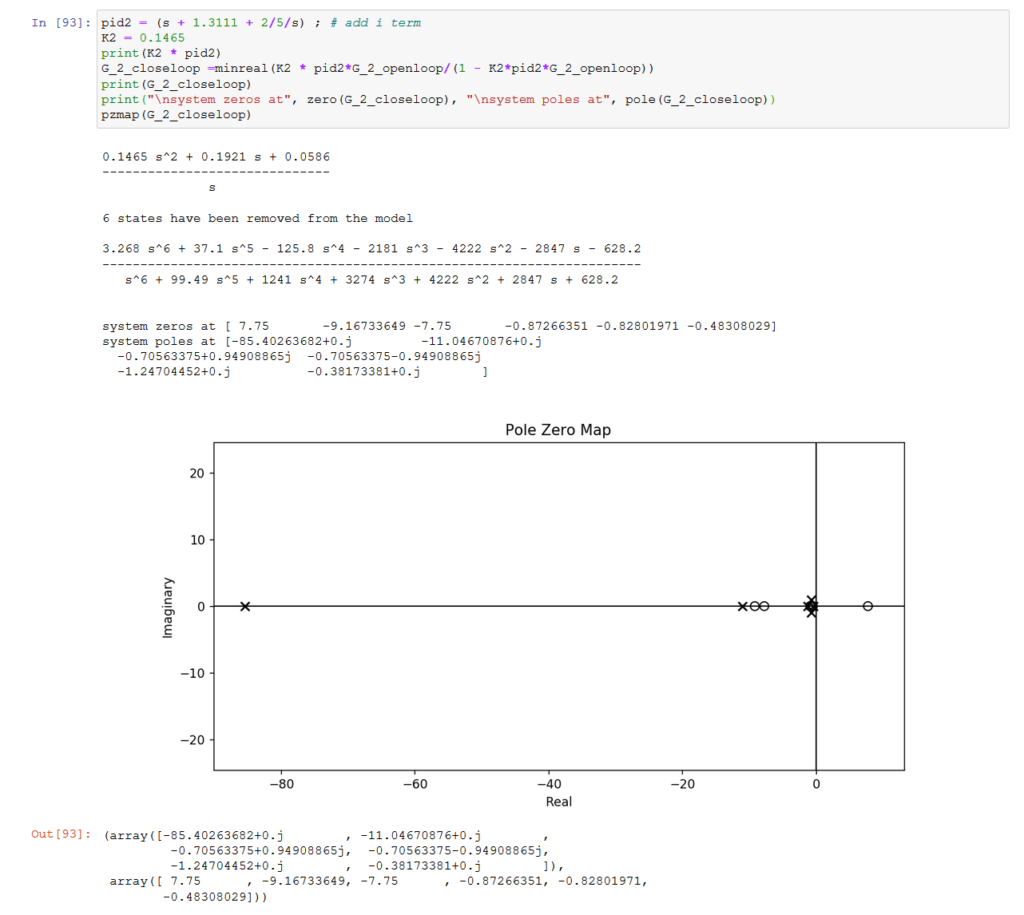
การออกแบบ จะต้องการเขียน Transfer Function ของตัวรถนั้น รวมกับ Transfer Function ของ Pendulum 🤨 และเราเลือกใช้ Positive Feedback มาใช้งานแทน Negative Feedback 🧐
มันเป็นอย่างไรต่างกันอย่างไร การออกแบบนั้นมีขั้นตอนแบบไหน สามารถติดตามได้เลยครับ…😁😁😁
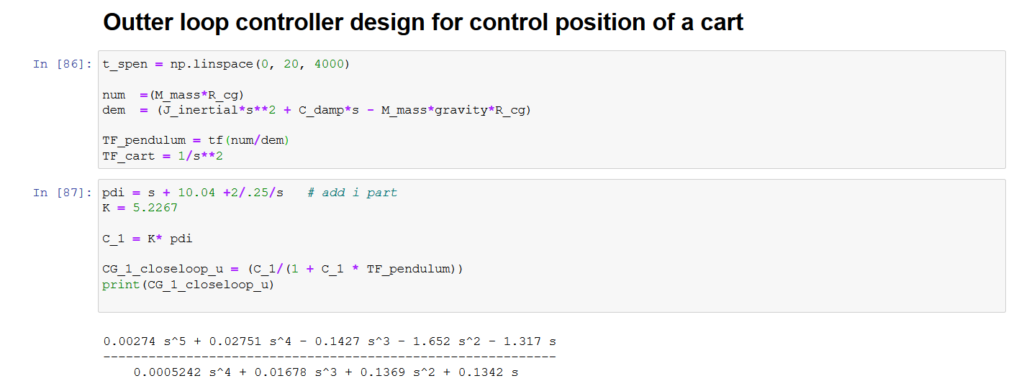
ตัวอย่าง code ที่ใช้ Example_code
ref:
Control Systems – Feedback
FEEDBACK CONTROL SYSTEMS
Root-loci 15 – basic rules for positive feedback
Root Locus Method for Positive Feedback System
สำหรับผู้ที่สนใจอยากศีกษาทดลอง ออกแบบระบบควบคุม Inverted Pendulum
ดูรายละเอียดได้ที่ https://www.aiiotshop.com/p/62
ขอบคุณครับ