
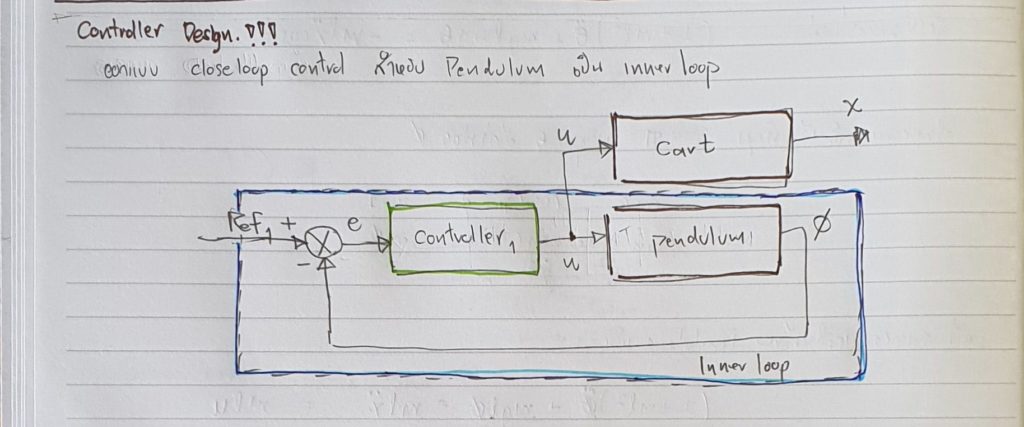
มาต่อกันเลยครับ…… inner loop controller design 😁😁
!!! เลือก PID gain โดยไม่ต้องใช้การ Tuning !!! 😂😂😂 มันได้หรือไม่ได้ให้รู้ไปเลย…..
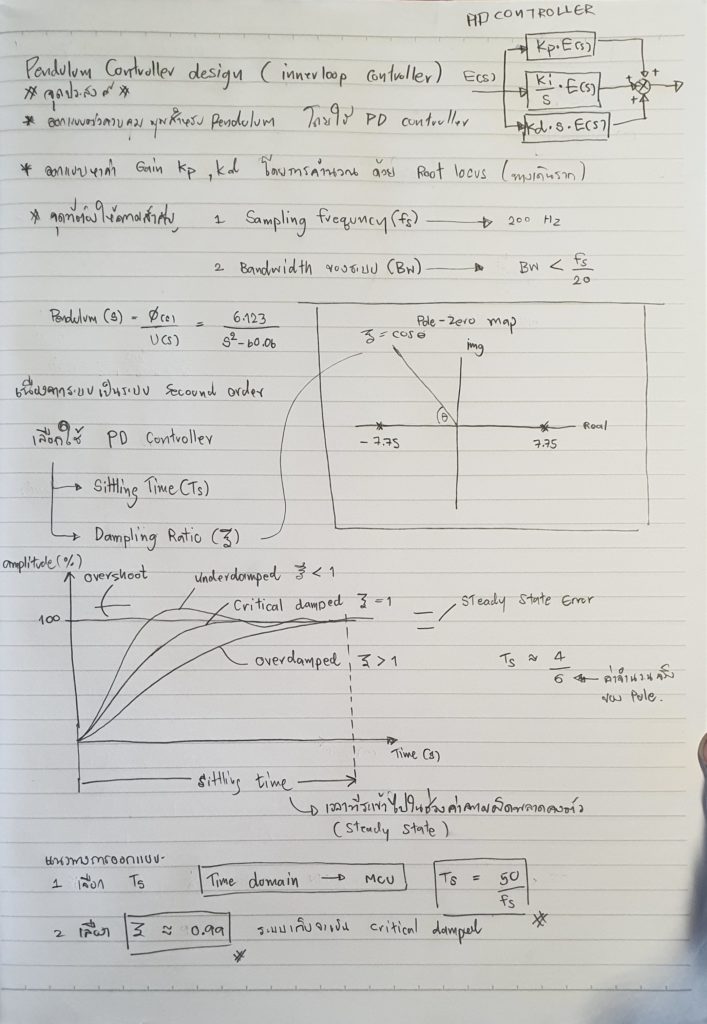
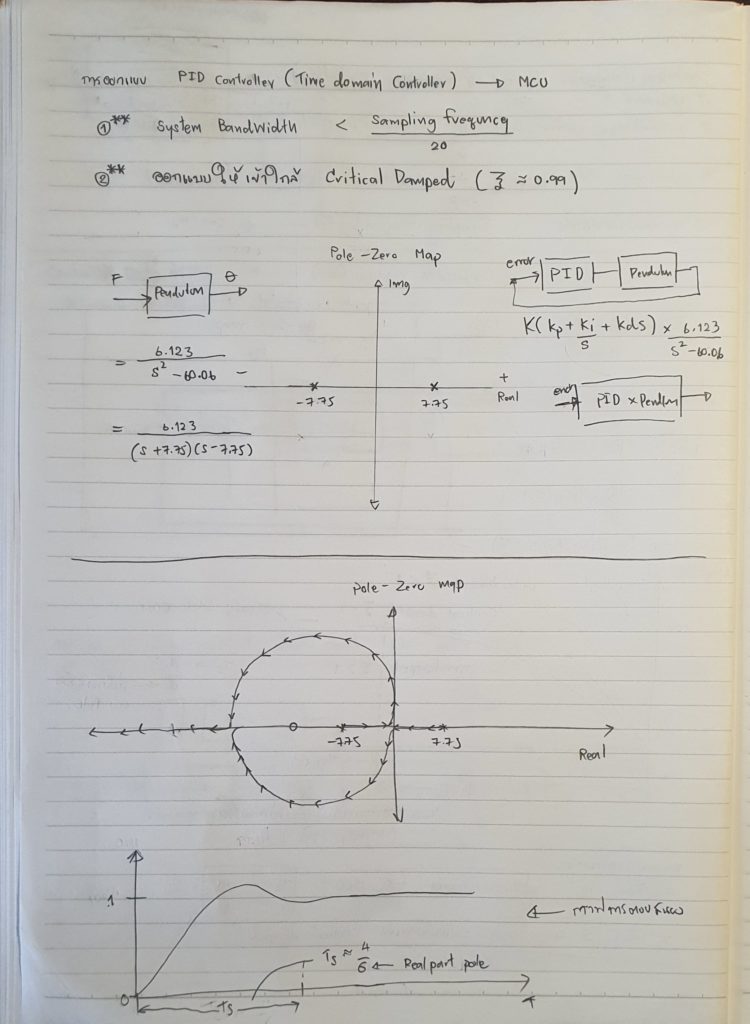
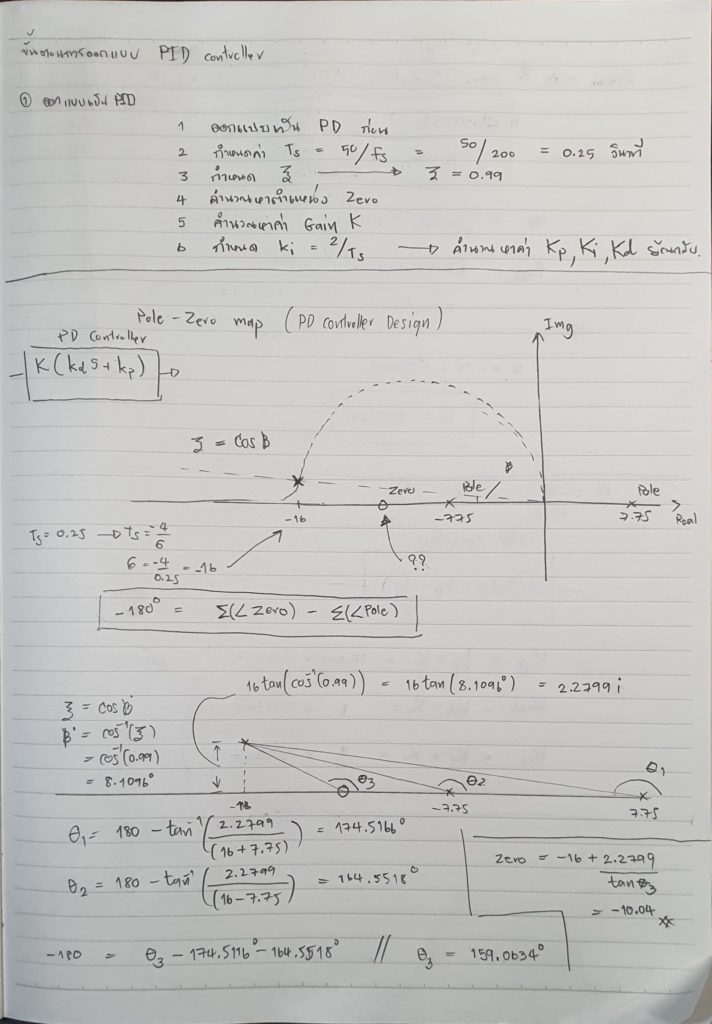
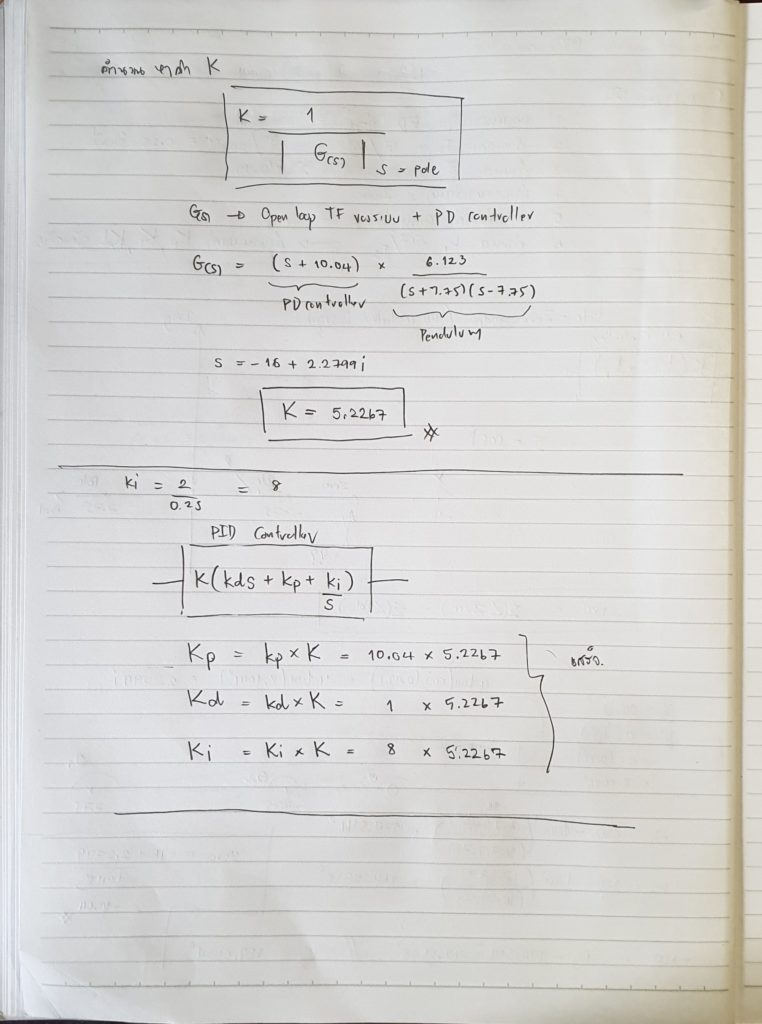
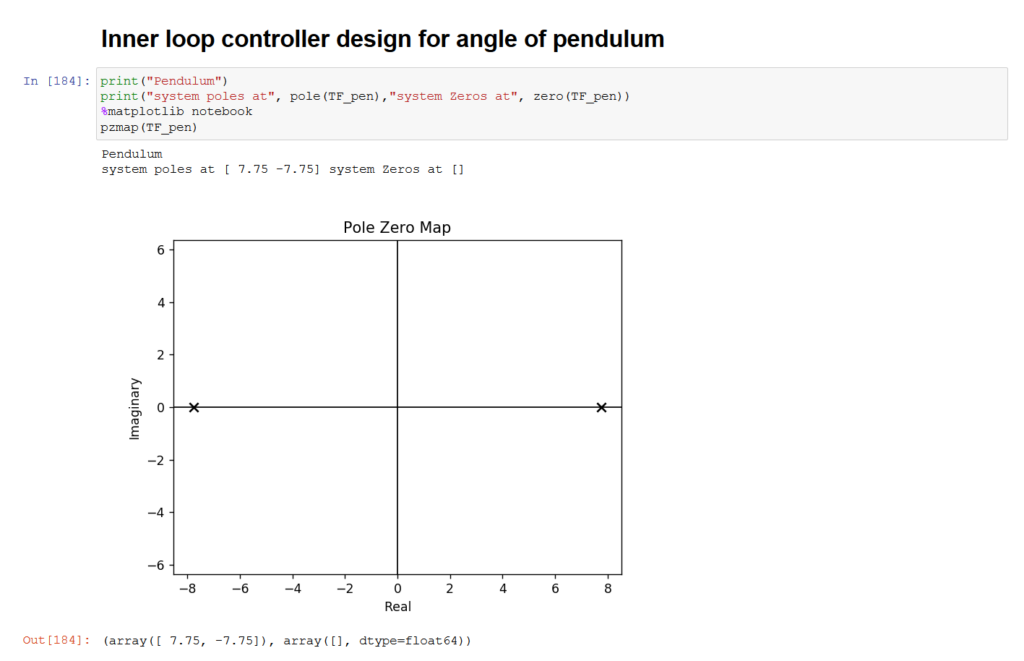
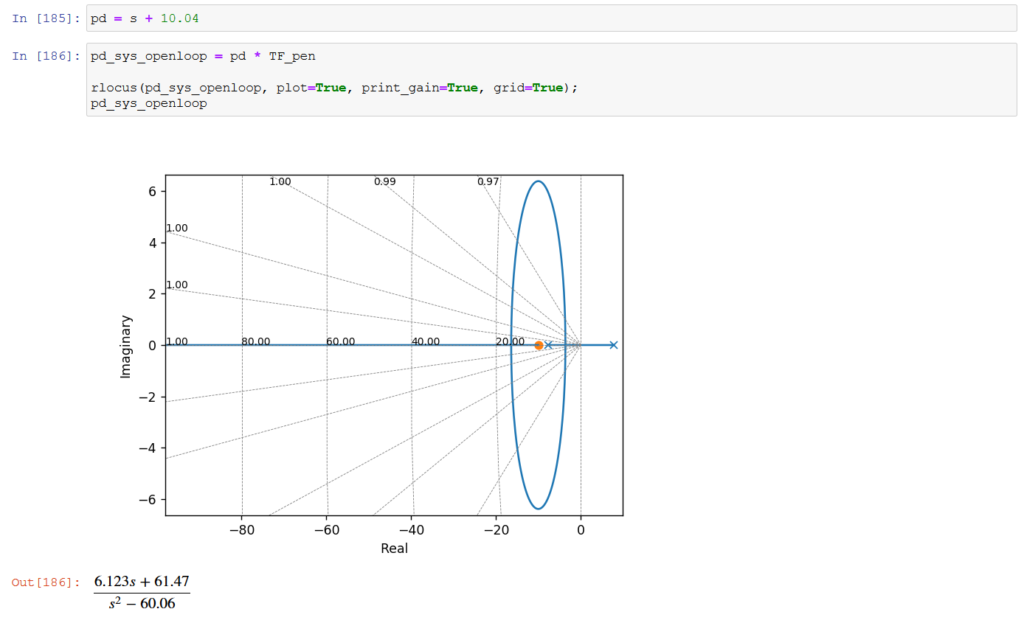
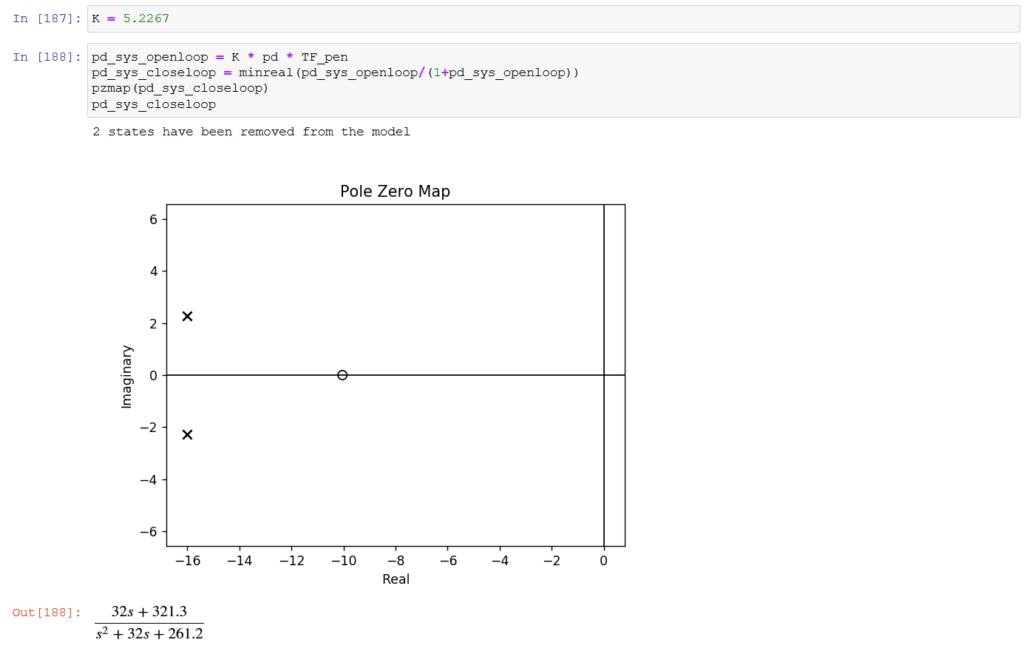
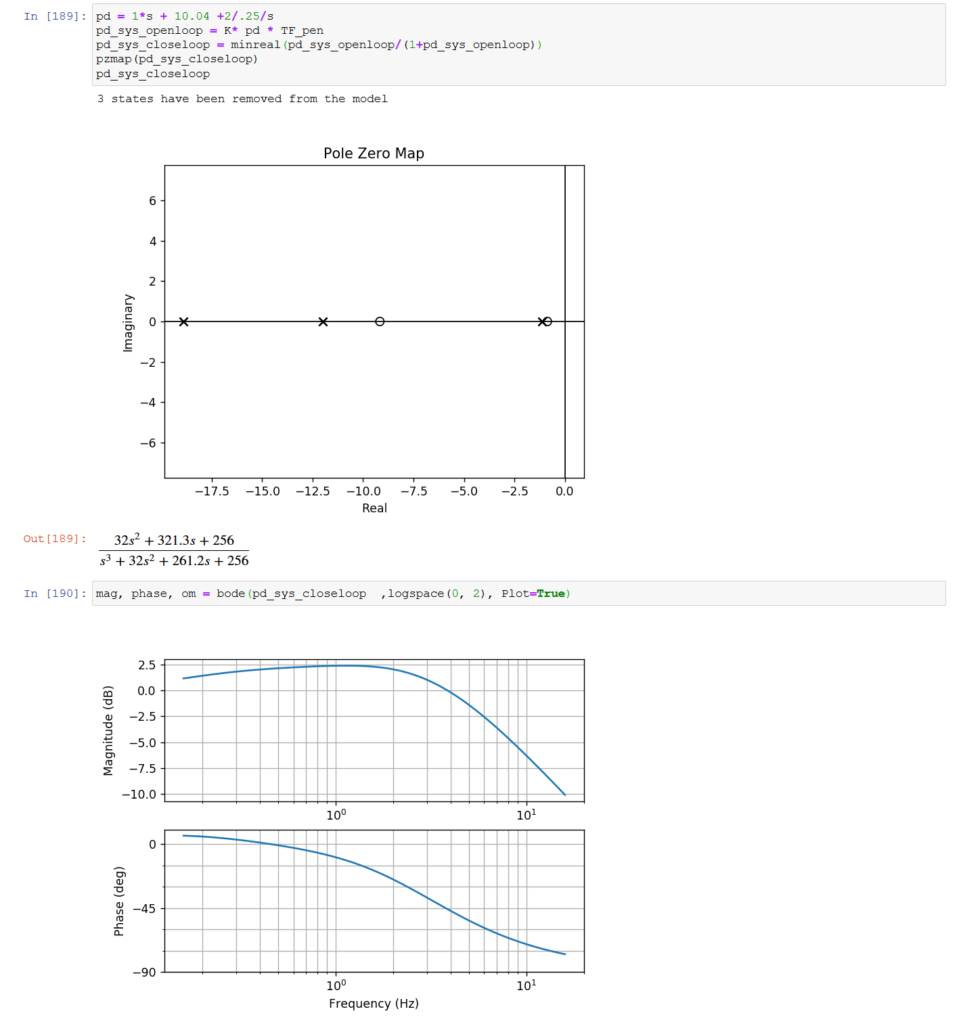
🤩 อาศัยหลักการออกแบบตามทฤษฎีเส้น root locus หรือว่าเส้นทางเดินราก เพื่อหาค่า kp ki kd ที่เหมาะสม ให้ระบบ Stable และ ตอบสนองตามต้องการ….😏😏
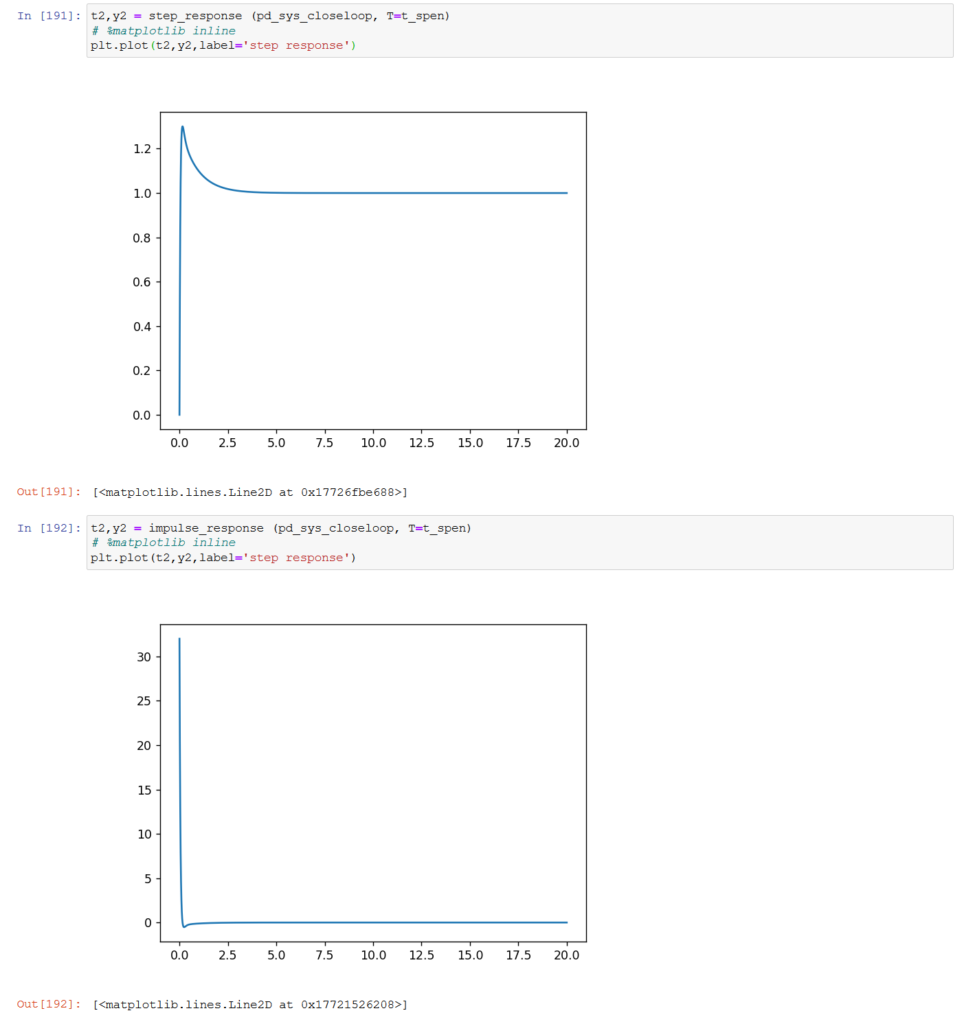
….มาลุ้นกันว่าค่าที่ได้จากการคำนวณตามทฤษฎี จะเอามาใช้จริงใน esp32 arduino หรือเปล่า….😏😏
ตัวอย่าง code ที่ใช้งาน Nano32(ESP32)
ref :
TheDesignofthePIDController
PID Control
PID Controller Design
Understanding Poles and Zeros
สามารถเข้าไปดูรายละเอียดชุดคิทได้ที่ https://www.aiiotshop.com/p/62